Sometimes a walking path in your yard separates two lawns. Sometimes they’ll run across the lawn, other times they might connect two areas of your lawn. If you want to use a mowing robot in your yard, the question arises in both cases whether it can even cross the path. And if so, what problems could there possibly be?
Can a robotic mower drive over paths? In principle, mowing robots can drive over paths, though it does depend on the nature of the path. A gravel path, for example, can be difficult, while paving stones are hardly a problem. A longer connecting path, however raises other questions. For example, you should avoid having your robotic mower “mows” over the walkway for too long.
What type of walkway can you have in your lawn without causing your robotic mower any problems? What type of problems can arise, exactly? What if the path is super long or super wide? How can you prevent the robot from always mowing or getting tangled up in the path? We will answer these questions and many more here!
Contents
Can robotic mowers traverse paths?
This question can only be answered if we clarify how exactly the path is designed. The robotic mower can drive over some paths with no problem, but others can prove difficult.
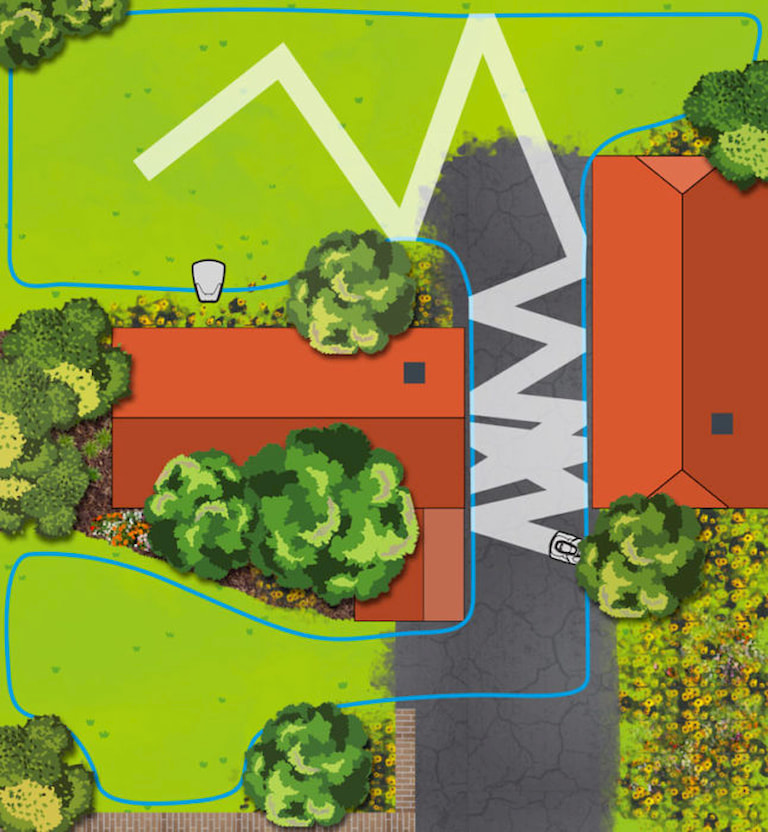
There are also two different scenarios where a robotic mower may need to cross a path. One is where the robot only has to cross over a path because it runs across the lawn, for example.
The other scenario is that the path for the mowing robot is a connection between two different areas of the yard, i.e. it travels from area A to area B and can only get to area B by driving along the path.
Different problems can then arise in different situations, which we will look at in detail.
What types of paths are there to consider?
- Paved
- Gravel
- Asphalt
- Concrete
Brick or cobblestone path crossing
Paths paved with brick or a similar material are probably the least problematic paths for robotic mowers. The robots generally have no problems with these paths if they are in good shape, i.e. have no holes or uneven areas.
However, you must also pay attention to a few things that specifically concern brick- or cobblestone-paved paths.
The junction of paved brick paths
Paved brick paths often have a raised cut off on the edge. A difference in height of an inch or two between the asphalt and lawn can pose a problem.
To prevent this from becoming a problem, the height difference must be compensated. You can, for example, build your yard up at the sides of the path to make it level with the edge of the brick or stone. Ultimately, your robotic mower must be able to get onto and off of the path without getting stuck on the edge.
Paved brick path as connection
Here you should actually not expect any problems, apart from the occurrence that the mowing robot stays on the path too long when it perceives it as an area to be mowed. However, we will deal with this problem later. In addition, it can cause the tires to wear out a bit faster if the robot drives a lot on pavement.
Crossing gravel paths
Gravel paths are much more problematic than paved brick for two reasons. Firstly, the mowing unit of the robotic mower can be severely damaged when it “mows” gravel. The stones not only dull the blades, but they can also break them. The smaller stones can also get into the more sensitive inner parts of the machinery and damage them. Another hazard: the robotic mower can sink into the gravel and get stuck.
The occurrence of either of these issues of course depends on the depth of the gravel. If the gravel is only a single layer on top of solid ground underneath, this is no problem. But usually the gravel is an inch or so deep. This is an issue for the robotic mower for the reasons mentioned above.
However, it is still possible for the robot to cross gravel paths. There are different solutions, but you have to make some effort, e.g. by excluding the gravel paths from the robot’s mowing area using the boundary wire, creating only specific crossings at certain “good” points for the robot to cross There are also other solutions that can only be implemented with certain models of robotic mower.
Crossing asphalt roads
Basically the same applies to asphalt paths as to brick or cobblestone paths. Asphalt paths tend to be less common in a lawn area, and are mostly found as driveways or connections between different areas of lawn.
Here too, the condition of the asphalt is important. If there are a lot of potholes, these must be repaired so that the robotic mower does not get stuck there. Or if the asphalt is very crumbly due to age, it poses similar problems as gravel. However, if it is in good condition, there is nothing to prevent the mowing robot from crossing it.
Be careful, however, if some places are tarred. At high temperatures in the blazing sun, tar becomes soft. If the robotic mower drives over it, it makes a mess and can even damage it.
If an asphalt path leading through the yard is to be crossed, you also have to make sure that the difference in height between the asphalt and the lawn is not too great or has a sudden drop. Otherwise the robot will just bounce off the path, or drive up and get stuck.
Crossing concrete paths
Crossing paths made of concrete is also no problem. Again, here it is important that the path is in good condition. A protruding slab would of course be a big problem. So take another close look at the concrete path to make sure everything is in order.
As with bricks and asphalt, the tires wear down a little faster when the mowing robot drives over longer distances, or over concrete for a long period of time.
Long or wide connecting paths can be a problem
If the robotic mower drives to the other lawn via the connecting path, for example via a remote start point on the boundary wire or the guide wire, the robot switches off its mowing unit and drives straight to the other lawn via the wire. So far everything is great.
However, it is also possible that the mowing robot may drive onto the path by chance during its mowing duties. In this case, it considers the path as part of the lawn and simply continues mowing.
Not only is it not sensible to mow paving stones, asphalt or concrete, that is wasted time. Since the robot turns around when it hits the boundary wire, it may ping-pong back and forth and not find its way out properly.
Even if the robot figures its way out at some point, it just wastes a lot of time on the way. It might even drive back and forth until its battery is empty and it returns to the charging station via the boundary wire or guide wire.
Even very wide connecting paths are not so great, because here too the mowing robot can easily drive on the path and spend a lot of time on the way without really doing anything useful.
A tunnel circuit prevents the robotic mower from “mowing” the connecting path
So you must somehow prevent the robotic mower from driving onto the path when it should be mowing your lawn. This is done with a so-called tunnel circuit. An additional cable is laid around your path, which works similar to the normal boundary wire.
The special feature, however, is that this cable can be switched on and off again. As long as the mowing robot is not on a trajectory to cross the connecting path, the additional cable is live.
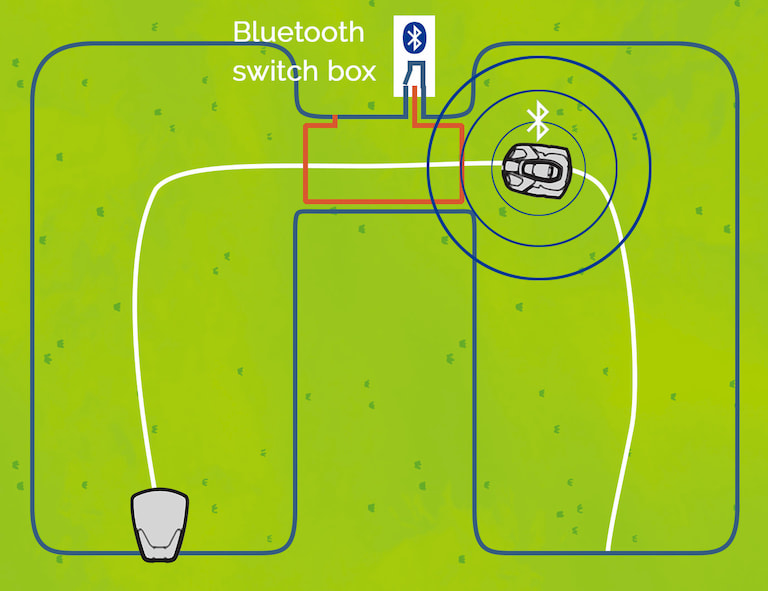
The power supply is only switched off when the mowing robot is about to reach the other area. In most cases, this is done by a switch which the mowing robot can trigger via Bluetooth.
I have already written about the tunnel circuit in another article here, if you want to know more about it. I have yet to find a dealer who sells something like this. It’s not something that can be bought from the manufacturers, but has to be custom made. If you know a specialist dealer or retailer who sells and installs something like this, please let me know.
The “loop trick” as a simpler variant of the tunnel circuit
If the tunnel circuit is too complicated or too expensive for you, or if you are worried about the warranty – usually the robotic mower has to be adapted so that it can trigger the Bluetooth switch – there is also a simple trick that you can use instead.
With the so-called “loop trick,” you narrow the entrance to the connecting path with the boundary wire by laying a loop on each side. In this way the mowing robot cannot pass through if it does not approach the passage directly from the front.
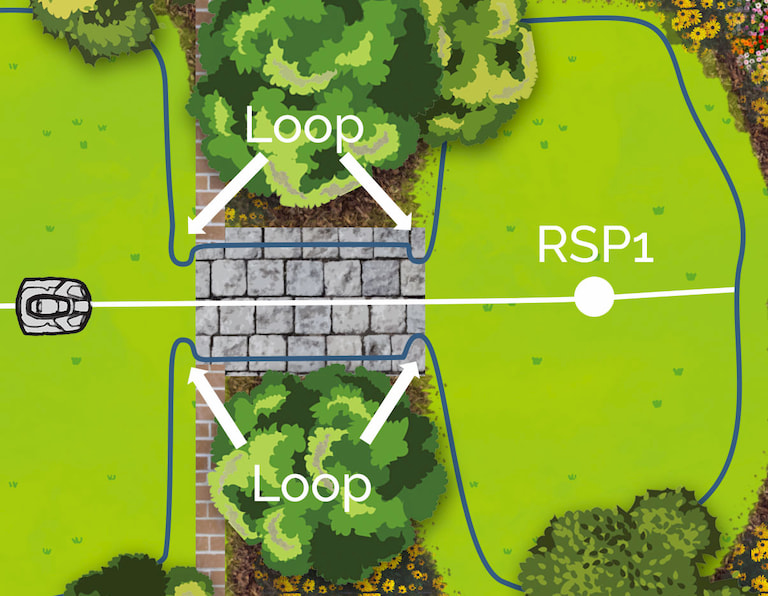
This works at least for mowers with a guide wire, because if they have to drive to the other area, they use the guide wire to navigate through the bottleneck and pass the loops.
For robotic mowers that use the boundary wire to control remote points, I unfortunately do not have any information about whether this works. If you have ever tried something like this, feel free to leave a comment.
Related questions
Should the boundary wire be laid under the paving stones? Ideally the boundary wire should be laid under the paving stones. It is best to use empty conduits for this. The boundary wire can also be laid in the gaps between the paving stones, but this only makes sense if the mowing robot navigates via a guide wire. The latter must then be laid under the paving stones in any case.
Also interesting: Laying boundary cables under paving stones for your robotic mower
Can a robotic mower treat two separate lawns? Under certain circumstances, a robotic mower can also work on completely separate lawns. If the areas are close together, the same boundary wire can be used and run from the main area to the secondary area. If this is not the case, either an additional charging station can be used or a signal transmitter/limit switch can be used.
Also interesting: Using a robotic mower for several areas: How it works