Surely you know that a robotic mower with a boundary wire has a battery to power it and that it needs to recharge it regularly at the charging station. But how does it actually find its way back to the charging station? I have dealt with all the possibilities that robotic mowers have to find their way back to the charging station and present my findings to you here.
How does the robotic mower find its way back to the charging station? There are several ways the robotic mower can find its way back to the charging station. Robotic mowers can find the charging station either via the boundary wire or, if available, a guide wire. They can also search randomly. The charging station also sends out radio signals that serve as an additional orientation aid for the robot.
There are some functions that all robotic mowers with boundary wire use and others that are only used by some. In the following sections I will explain how the different functions work, which robotic mowers find their way back, and what can make navigation more difficult.
Contents
How robotic mowers find their way back to the charging station
In general, there are three different search methods with which the robotic mower can find its way back to the charging station. At random, via the boundary wire, or via the guide wire.
The charging station also sends out signals that the robotic mower can pick up if they’re in the immediate vicinity of the charging station. A distinction is made between the remote signal and the local signal.
The search mode
As soon as the robotic mower is running out of juice, i.e. when its battery is at about 20%, the robotic mower has to go back to the charging station. It then selects one of the search methods described below:
- Search at random
- Search by boundary wire
- Search by guide wire
If the robotic mower has several methods available to search for the charging station, it decides which search method to choose according to a priority system. With many robotic mowers you can now set these priorities yourself.
You can tell the robotic mower to first search for the charging station using method A. If it has not found the charging station in the allotted time, it should then switch to method B and so on.
The local signal of the charging station
Each charging station emits what is called a “local signal.” This is a signal that is emitted by a circuit board in the charging station and only reaches about one meter. So it only has a very short range.
The robotic mower only detects this signal as soon as it has more or less already found the charging station, to navigate parking itself in the charging station with centimeter-precision in order to recharge. In contrast to the remote signal, the local signal is much more precise.
As soon as the robotic mower comes within range of this signal, it ignores all other signals, such as the guide wire. It then moves straight towards the source of the signal. This is also the reason why there should always be a free area around the charging station. 3 meters is the best, although this cannot always be guaranteed,
If, for example, there is another obstacle in the immediate vicinity in front of the charging station, such as a small wall or the like, it is possible that the robotic mower will approach the wall, where it then picks up the signal from the charging station, and tries to drive through the wall head-on.
However, what the robotic mower does not ignore is the boundary wire. If the robotic mower drives over the boundary wire on its way to the charging station, this is a signal that it has lost its way a little, which causes it to stop and turn in another direction. For this reason, the boundary wire should never run in front of the Base Station, but should run to the side of the Base Station at the rear.
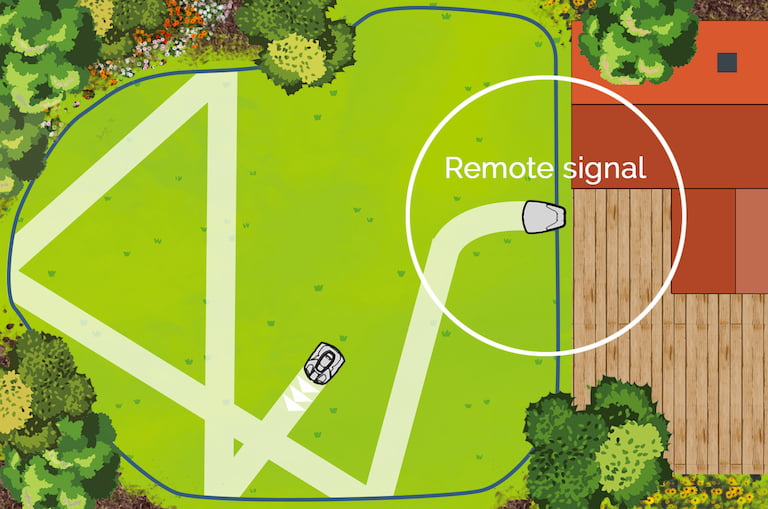
The remote signal from the charging station
Some charging stations also have a “remote signal.” The remote signal works very similarly to the local signal. However, it has a much greater range of up to 10 meters, but is less precise, i.e. the robotic mower can only approximate the location of the charging station with this signal.
Another difference to the local signal is that the remote signal is usually adjustable via the menu. The range can be changed or it can be switched off completely.
As soon as the robotic mower comes into range of the remote signal, it tries to drive on a straight path to the source of the signal, i.e. to the charging station. It does this by “trial and error”, i.e. if it runs into something on its way, be it the boundary wire or an obstacle, it corrects its path.
Nevertheless, the immediate vicinity of the charging station should remain free of obstacles so that it is not unnecessarily difficult for the robotic mower to find its way back to the charging station. If an obstacle is obtrusive, the robotic mower may not be able to find its way back to the charging station at all.
Even if the robotic mower approaches the charging station from behind, for example because it has been installed on a bend, it is possible that the robotic mower will then bump against the boundary wire for quite a while.
For this reason, you can also reduce the range of the remote signal, or turn it off because it can cause problems in some situations.
Searching the charging station at random
The robotic mower can decide to randomly search for the charging station in search mode. It then simply ping-pongs through the lawn until it comes within range of one of the radio signals.
In a very simple, rectangular lawn, which is also not too large, this can also work very well. If the remote signal is set to maximum, the robotic mower can quickly find the charging station.
However, in more complex lawns, with many angles and corners, long passages or even several lawns, this is a method that is doomed to failure. Therefore there are two other methods.
Finding the charging station using the boundary wire
Another method that the robotic mower can use to find the charging station is to search along the boundary wire. Here the robotic mower first drives through the area again at random until it hits the boundary wire, which usually does not take very long.
Since the boundary wire is connected to the charging station, it now only needs to follow the wire along the perimeter until it reaches the charging station. There it will be within range of the radio signal of the charging station, which will then guide the mower with centimeter-precision into the station.

An advantage of this method is that it does not take very long for the robotic mower to find its way, because the mower can find the boundary wire quite quickly from practically any place in the yard.
One disadvantage is that the way back can take quite a long time in complex lawns. If the lawn has a lot of bays around the edges, outlying peninsulas and the like, the distance it has to drive along the boundary wire can be quite long.
Therefore, robotic mowers for complex lawns often have a guide wire.
Searching for the charging station using a guide wire
Finally, some robotic mowers can search for the charging station using a guide wire. This is a cable that you lay in the middle of the entire working area of your robotic mower. It starts at the charging station and ends somewhere at the boundary wire. You deliberately lay it through bottlenecks and connect all subzones and remote areas that exist with the cable.
For very complex lawns, there are even robotic mowers that are equipped with several guide cables. This means that even complex lawns that have very strong branches can be covered well.

The principle is then similar to that of the boundary wire: the robotic mower drives around at random until it hits the guide wire. Once there, it can then find its way back comfortably via the guide wire.
In contrast to the return via the boundary wire, the return via the guide wire is much faster in complex lawns. For example, it is not uncommon for the boundary wire to take the robotic mower 300 meters, while it may only have to travel 30 meters along the guide wire.
The guide wire actually has no real disadvantages, except that it’s benefit is slightly reflected in the price and requires additional, albeit small, effort during installation.
Which robotic mower uses which technology?
Almost all robotic mowers with boundary wire can find the charging station by chance or via the boundary wire, but only some robotic mowers have a guide wire. These are mainly robotic mowers from the manufacturers Husqvarna and McCulloch.
Here is a list of some models that can find the charging station via a guide wire:
Related questions
Why does the robotic mower no longer return to the charging station? There can be many reasons why a robotic mower no longer drives back to the charging station. A common error is that the robotic mower has not switched from manual mode to automatic mode. Other causes are a coiled loop cable near the charging station, or the boundary wire at the front of the charging station being too close.
How is the charging station installed? The installation of the charging station on the robotic mower consists of the following steps:
- Finding a suitable location
- Plugging in the transformer to a power source.
- Placing and plugging in the cable coming from the transformer
- Connecting the laid perimeter wire (and guide wire) with the charging station
- Attaching the charging station to the ground
Learn more: Install the charging station of the robotic mower: How to do it





