If you’re anything like me, you’ve spent hours searching the Internet for what’s behind the passage mode or Husqvarna Automowers’ automatic passage detection. If so, you’ve finally come to the right place. For a long time, I didn’t really understand what exactly is meant by this, how it works, and that there are also certain misunderstandings about how it works. That’s why I want to explain everything to you here.
What is the Automower Passages mode? The passage mode is also called automatic passage detection and enables the robotic mower to drive through very narrow passages when moving towards a target via the guide wire in search mode. While the robotic mower normally drives slightly offset from the guide wire, it abandons this tactic in passage mode and orients itself directly on top of the boundary wire instead.
Misunderstandings sometimes arise here. There are also a few things to keep in mind so that the passage mode works really well when you connect several different surfaces together. I will explain this in more detail in the following sections.
Contents
This is what the automatic passage recognition is all about
The specific term that Husqvarna uses is actually “Automatic Passage Recognition.” The term “Passage Mode” is also misleading in that it is not a mode that can be turned on or off. The Auto Passage Detection is used to enable the Automower to drive through narrow passages in Search Mode, even when driving next to the guide wire.
The search mode is a separate mode. Husqvarna Automower is equipped with at least one or more guide wires that are connected to the charging station. These guide wires can be used to set waypoints, known as remote start points, which the mowing robot can then drive to.
These remote start points are especially useful if you have several lawns that are only connected by a narrow passageway. You can define such a point on each lawn area. You can then program the mowing robot so that at certain times the robot moves to this remote starting point or area via the guide wire.
In order to prevent the formation of tracks along the guide wire, the mowing robot does not always travel exactly on the guide wire, but at a distance next to the guide wire which it constantly changes. This is a hindrance in bottlenecks, because if the guide wire is laid centrally through the passage, the mower would then drive against the edge.
Different lawns can be connected by passages that are 24 inches or wider. If the guide wire passes through such a narrow passage, the Automower would under normal circumstances sometimes run into the edge of the passageway if it drove too far away from the wire. The automatic passage detection function detects the narrow passage and drives over the middle of the cable at this point.
So there is no extra module or something like that called “passage mode”. It’s not a function that you can just switch on, it’s just the intelligent behaviour of the Automower when it drives through a narrow passage via the guide wire.
In order for the mowing robot to drive through the passage at all, you must of course also define a remote start point on the area to be controlled. You can do this via the Automower menu. In the Menu, select Installation, then Lawn coverage, then Area 1. There you can enter the distance in yards that the remote start point is from the charging station via the guide wire.
- Installation > Lawn coverage > Area 1 > How far?: 40 yd
You can also determine how often the mowing robot should mow there. This is best done depending on the size of the area. You can also find the corresponding setting via Installation, Lawn coverage, Area 1 and then How often?. There you can choose whether the remote start point should be approached frequently, occasionally, or rarely.
- Installation > Lawn coverage > Area 1 > How often?: 20 %
To create a passage
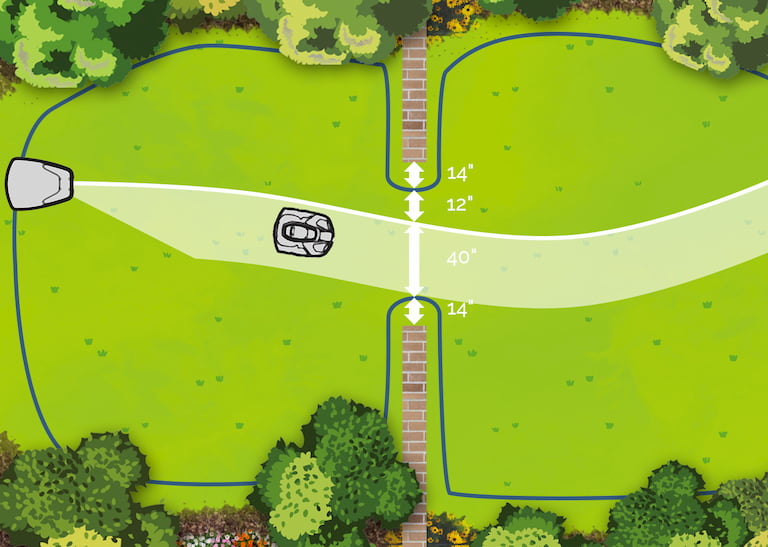
A passage can be created relatively easily. First lay the boundary wire left and right along the passage and then run it around the adjacent area. Make sure that there is always at least 24 inches of space between the boundary wires.
Lay the guide wire right through the middle of this passage. Again, make sure that there is at least 12 inches of space on both sides, otherwise the Automower will not be able to pass through the passage properly.
Possible problems with bottlenecks
The Automower detects narrow passages in search mode and deliberately does not react very sensitively to the boundary wire. As long as it’s in search mode, everything here usually works fine. However, a problem can arise if the mowing robot in normal mowing mode accidentally drives into the passage. The robotic mower is in no way prevented from entering the passage in mowing mode, which can still make narrow passages a problem – despite the existence of “passage mode”.
This can cause the mowing robot to get tangled up in the passage for quite some time, because it constantly drives back and forth in the narrow passage and is simply completely disoriented. It is also not uncommon for passages to be formed between areas where the passages themselves do not have any grass at all, but instead have, for example, pavement slabs, cobblestones, asphalt or the like. So it would be a waste of time if the robotic mower was constantly tinkering back and forth on this passage to “mow” everything there.
How’s the robot supposed to know there’s nothing to mow? This problem can be solved in two ways.
- A: skillful routing of the cable at the entrance to the passage, so that the probability of accidental entry is minimized
- B: Installation of a so-called passage circuit or tunnel circuit
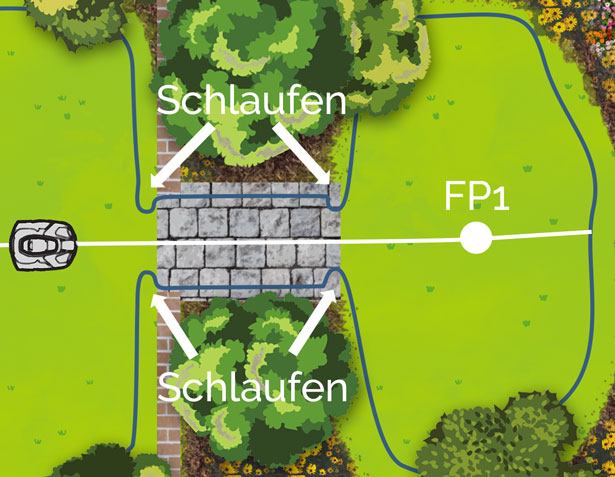
To prevent your mowing robot from accidentally driving into the passage, you can use this very simple trick when laying the boundary wire. As shown in the following picture, you simply make a small peninsula on the left and right side. This way the mowing robot can only drive through the passage when it is driving straight towards it. The solution does not work in 100% of cases, but in 99.9% of cases.
A passage circuit prevents getting lost in passages
If option A does not work and your robotic mower still gets lost in the passage, you can install a so-called passage circuit. This is not offered by the normal robotic mower manufacturers. However, there are many third party suppliers who offer such a passage circuit.
With a passage circuit, an additional loop is placed around the passage, which is connected to the main boundary wire by means of branch terminals. At one end, where the passage cable meets the boundary wire, there is a switch box with which the mowing robot can communicate by means of a Bluetooth module.
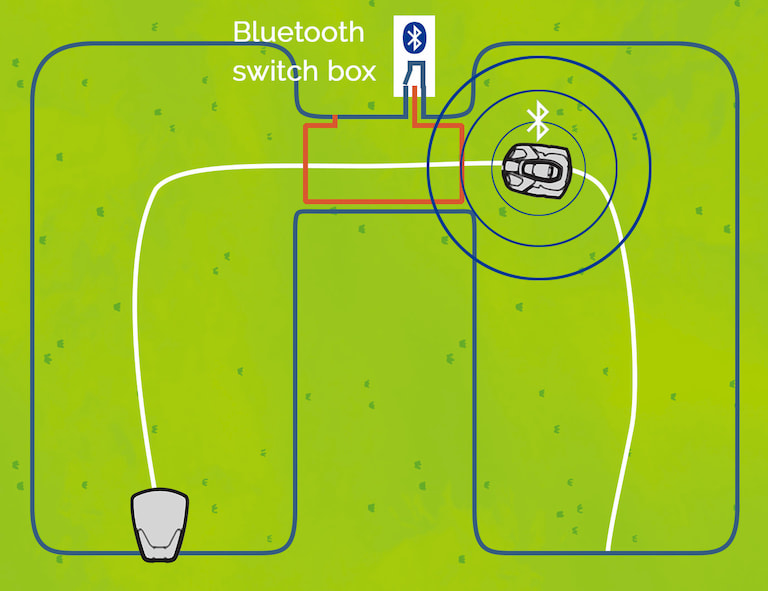
When the passage control is activated, the mowing robot cannot drive through the passage. If the Automower approaches the passage in search mode, it signals the switch box that it now wants to drive through the passage, which causes the switch box to interrupt the passage loop to allow the mowing robot to pass through.
Once the Automower has made it through the passage, the loop is reactivated and the mower can no longer enter the passage and get lost in the mowing mode.
Note: As the Bluetooth module is not from Husqvarna itself, and it can only be installed by tampering with the Automower, which will render the warranty of the robotic mower void.
Related questions
How many areas can the Automower mow? The number of separated areas that can be mowed by connecting passages with an Automower depends on the number of remote starting points that can be set. These vary from model to model. Sometimes 3 or 5 remote starting points can be set. The maximum area output of the Automower is also a limiting factor.
Does the automatic passage recognition have to be activated? The automatic passage recognition is constantly active from the moment the mower leaves the factory. It cannot be deactivated via the menu either.





Hallo Matthias,
First off, thank you for a really in depth guide on the Automower.
Finally some real info an not just generic base info.
I got a question that I cannot find the answer to.
I got 3 different areas on my lawn.
I got the charging station in area 1.
Area 2 and 3 is only accessible from a passage from area 1 to area 2.
To reach area 3. I need to use the same passage that I use going from area 1 to area 2.
How should I go about this.
Can I make a 1m wide passage and have two guide wires passing thru that?
How close can the guide wires be?
MFG Marcus
Hi, do you have a source for the bluetooth passage switch?
Hi Matthias
I am installing my 315X and looking like i need the peninsula trick (thank you for your suggestion). What would the distance between the 2 point of the peninsula, still 24 inches or can it be smaller. My layout will never use the boundary wires to return to the charging station or Area 2, it only uses the Guide Wire. It is a driveway with very small stones that the blades can’t get too. What is the result if the boundary wires are say at 6 inches apart with the Guide Wire going through the middle