The installation of the boundary wire of a robotic mower in narrow places is not always easy. How wide must the passage be? What do you have to pay attention to at the edges? How must the guide wire be laid? I have gathered up all these questions and written a summary here.
What must be taken into account when laying the boundary wires of a robotic mower in narrow places? The following rules must be observed when laying the boundary and guide wires of a robotic mower:
- The minimum distance between left and right boundary wire
- The minimum distance between the guide wire and boundary wire
- The corridor width of the guide wire
- The distance between boundary wire and external obstacles
- Special features of the connecting passages
Contents
What is the minimum width for a narrow passage?
Here you have to differentiate more precisely the breadth of what we are talking about. There is the distance between the left and right boundary wire in a passage and the distance between a left and right fixed obstacle. But also the length of the passage plays a role.
A few brief explanations before:
- The boundary wire must not run too close to itself, otherwise the magnetic fields cancel each other out or at least interfere with each other. Therefore there is a minimum distance here.
- The boundary wire must also maintain a minimum distance from the outer edge. This depends on the area or object that borders the lawn on the outside. The distance must be the greatest for solid objects or obstacles as a boundary (wall, fence, tree), otherwise the mowing robot will bump into them
- This distance must be maintained so that the mowing robot can always pass smoothly in a narrow passage between two fixed obstacles (except in search mode)
- For longer passages, the passage should be wider, otherwise the mowing robot will drive back and forth, ping-ponging around the passage, and thus stay there for a long time
- Some mowing robots have a guide wire that runs across the center of the working area. This cable must maintain a minimum distance from the boundary wire
- For mowing robots with a guide wire you can usually set a corridor width. This means that the mowing robot does not always drive exactly over the guide wire, but somewhere within a corridor next to the guide wire. This is to avoid the formation of tracks.
What is the minimum distance between boundary wires?
Short passages: With most mowing robots, the minimum distance between the left and right side of the boundary wire on very short passages is 2 feet. You can choose this distance in short passages, e.g. a gate or something similar. If the width of the passage is any smaller, the robotic mower may be irritated by the closely spaced cables.
Long passages: On longer passages, you should choose a much wider distance between the boundary wires, otherwise there is a risk that the mowing robot will mow for a very long time in this area, which will affect the appearance of the lawn. Longer passages that are narrower than 6 1/2 feet should therefore be avoided. The only exception: if the passage is a connection between two areas that should not be mowed at all even by the mowing robot (e.g. a cobblestone path).
How small can the distance from the boundary wire to the edge be?
The distance you should choose between the boundary wire and the outer perimeter of your lawn depends on what the lawn is bordered by at that particular point.
- Tall, solid obstacle (wall, fence, tree): 14 inches
- Small ditch, low stone edge (flower bed): 12 inches
- Ground level solid boundary (brick, asphalt, concrete, tiles): 4 inches
When mowing, robotic mowers drive a little over the boundary wire, usually around 12 inches. On some models you can adjust this.
If there is a tall, solid obstacle, such as a wall or tree, you must choose a particularly large distance between the boundary wire and the outer edge, 14 inches for most models. This is the only way to prevent the robotic mower from regularly hitting the obstacle. Among other things, this prevents the outer shell from wearing out too quickly.
If the lawn is bordered by a small ditch or a low stone edge, the body of the robotic mower can protrude slightly beyond this border. However, the wheels should not get into this ditch, as the mower may then get stuck there. Therefore you can choose a slightly smaller distance of 12 inches.
The distance of the boundary wire to fixed boundaries at ground level, such as a paved path, tile or asphalt, can be selected as small as possible. For the robotic mower it is no problem to drive over these types of boundaries with its wheels. A distance of 4 inches or sometimes up to 4.5 inches is best suited here.
But what does that mean for our narrow passageway? It means that you have to add the distance between the boundary wire and the outer edge, to the distance between the boundary wires.
So if your boundary wire is the minimum 2 feet apart, but you are passing through a gate, for example, there must be another 14 inches of space to the left and right of the wire to ensure that the mowing robot always passes through. Otherwise it is possible that it will bump into the left or right side of the gate when passing through the narrow passage, which will cause it to turn back. In this case, the total width of the bottleneck should be 24 inches + 2 x 14 inches, i.e. 4.25 feet.
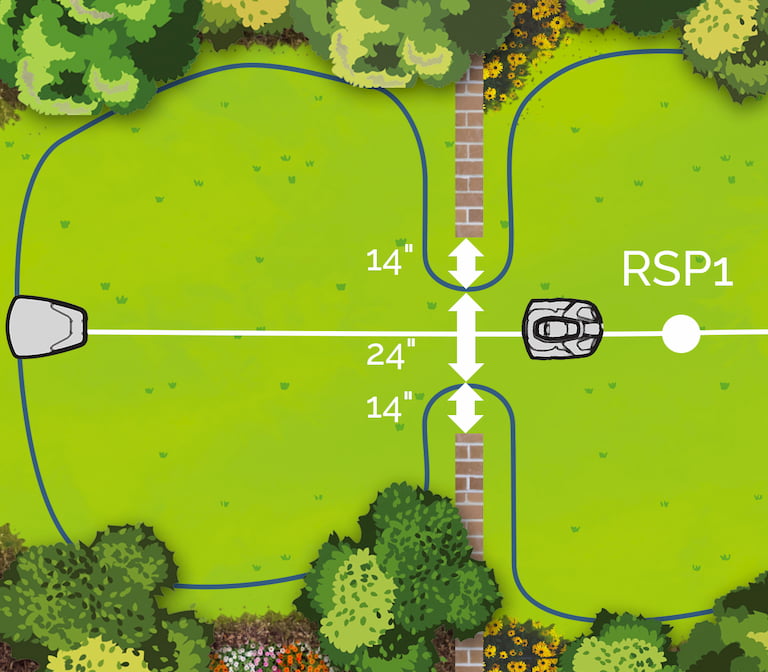
The only exception: You send your robotic mower through the passage in search mode via the guide wire. Then the mower won’t cross too far over the boundary wire and, for example, bump into the gate, because it orients itself on the guide wire when passing through. If you have very narrow spots in your garden, you should buy a mowing robot with a guide wire, where you can set up remote start points.
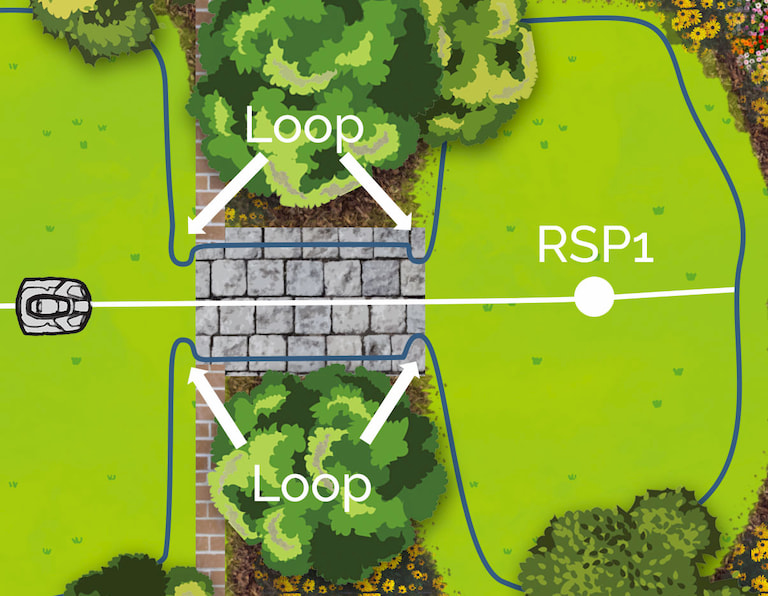
With the loop trick the mowing robot does not accidentally drive into the passage
Then you can equip areas that are on the other side of the bottleneck with a remote start point and tell your mowing robot to drive to the remote start point via the guide wire.
The distance between boundary wire and guide wire must not be too small
If your robotic mower has a guide wire, the distance between the boundary wire and guide wire should not be too small. For most models, the minimum distance between the boundary wire and the guide wire is 12 inches.
A current also flows through the guide wire, which generates a magnetic field. If the guide wire and boundary wire are too close together, the two wires will interfere with each other. If your boundary wires are at least 2 ft apart as described above, the guide wire will just barely fit through. However, there is still the corridor width to take into account.
The width of the passageway should be taken into account for bottlenecks
Mowing robots with a guide wire either drive back to the charging station via the cable, or drive to a specific remote starting point defined by you. However, they do not always drive exactly over the guide wire.
Instead, there is a certain corridor next to the guide wire, within which your mowing robot selects a lane on which it will drive. This is so that the lawn robot is not always following exactly the same path, forming tracks due to wear and tear of the lawn. The corridor is always to the right of the guide wire when viewed from the charging station.
Automatic Passage Management
If your mowing robot uses the Automatic Passage Detection or Easy Passage function, you do not have to take the corridor width into account. See the next point.
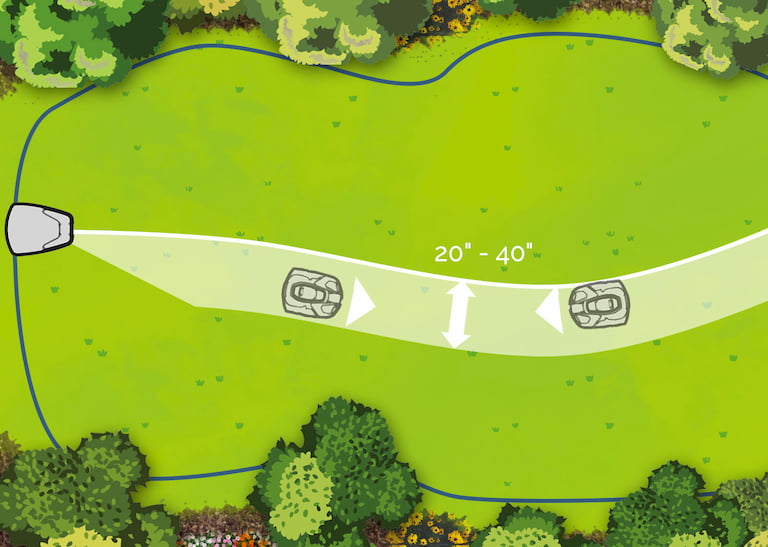
You can adjust this corridor on most models completely. Usually there are several steps from 0 to 9, which correspond to a certain width. At the highest level, the robotic mower then travels parallel to the guide wire up to 40 inches to the side of the wire, whereas when the mode is switched off (0), it travels directly on top of the guide wire. From about 1.5 m in front of the charging station it always drives on the guide wire, regardless of which lane it has previously selected in the corridor.
On the Automower you will usually find the setting under:
- Installation -> Advanced -> Corridor width
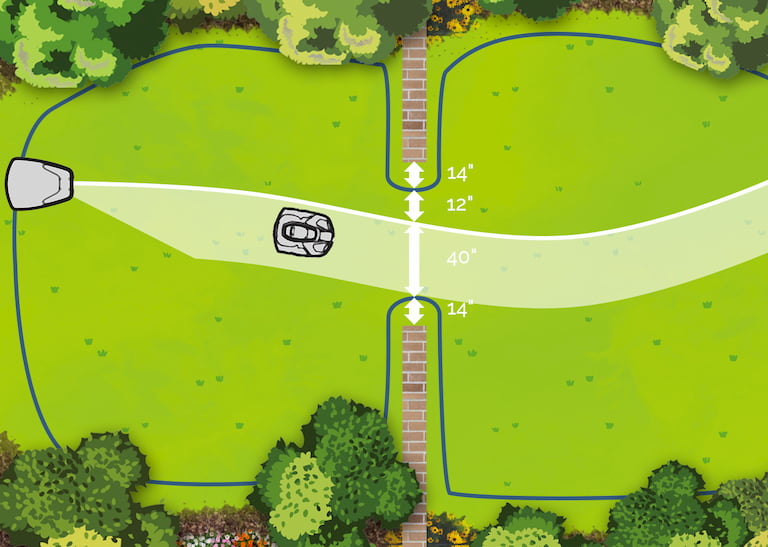
If you want to use the corridor mode, your passages must be wide enough. You then have to add the width of the corridor, plus the minimum distance of the guide wire on the opposite side so that the robotic mower can drive through. For example, if you have chosen a corridor with maximum width, i.e. 40 inches, then the entire width of the corridor will look like this:
14 + 12 + 40 + 14 in
Distance BW edge + distance GW-BW + distance GW-BC with corridor + distance BC edge
Automatic Passage Management function recognition and Easy Passage
HUSQVARNA Mowing Robots have the “Automatic Passage Management” function.
With this function, the corridor width on the guide wire is organized by the mowing robot itself. This means that whatever you have set is ignored by the robotic mower. Instead, it automatically detects narrow passages and reduces the corridor width so that it can drive cleanly through the passage.
If you decide to have this function always activated, you can ignore the corridor width at the bottlenecks. However, there is then no going back, i.e. you must always have the function active so that the robotic mower can pass through the passage.
Limitations when passage switching
If there are several areas connected by a narrow passage, you may sometimes not want the passage itself to be mowed, for example because it is a paved path. In search mode, the robotic mower can use the guide wire to drive to remote starting points you have set, or it can return to the charging station and drive through narrow passages – I already mentioned this in the previous section.
The only problem is that you cannot prevent the mowing robot from driving into these passages even in mowing mode. As shown in the example above, you can use some tricks with the boundary wire and create special loops to minimize the probability of the mowing robot accidentally driving into the passage.
But if you want to be absolutely sure that the robotic mower does not accidentally drive in there, there is the so-called passage circuit. This means that there is an extra cable around the passage itself, which prevents the mower from driving into the passage when it is switched on. Your robotic mower can then transmit a signal via Bluetooth to a switch that temporarily opens the passage.
In the last section of this article I have gone into this in more detail.
Related questions
What is the minimum distance between two guide wires? The guide wire, like the boundary wire, must always be at least 12 inches from another guide wire. For example, if several guide wires run in the yard or the same wire is routed back and forth over the same distance, care must be taken to ensure that this distance is maintained.I have a very narrow passage through which the guide wire must run twice. What can I do? If it is necessary to lead the guide wire back and forth in a very narrow passage, but this is not possible due to the width, it is usually advisable to use a mowing robot with several guide wires or GPS.