Can robotic mowers actually navigate through narrow spaces in the yard? And if so, how do they do it? Does navigation through narrow places work perfectly? By now I know the strategies of the different models quite well and want to give you a short overview here.
How do robotic mowers get through narrow places in the yard? Robotic mowers make use of different technologies when coping with narrow places. For example, navigation through a bottleneck can be done via remote start points on the guide or boundary wire. Other supporting technologies include AIA on WORX Landroid robotic mowers or automatic passage recognition on HUSQVARNA Automowers.
Here you can find out exactly how it all works, which robotic mowers use which technology and what you may need to bear in mind when they pass through narrow spaces.
Contents
How do robotic mowers deal with narrow spaces in the yard?
Mowing robots deal with bottlenecks in the yard in different ways and not all models cope with bottlenecks equally well. Some are not suitable for narrow places at all. A good indication of whether a robotic mower can cope with bottlenecks is whether it is generally designed for a yard with several areas, or one big area.
If you would like to learn more about how mowing several areas, whether connected or not, works with a robotic mower, you can read all about it in this article.
A robotic mower that only drives through the yard randomly and has no other method of navigation will have its difficulties depending on the nature of the bottleneck. However, some robotic mowers fall back on further techniques for navigation. These are
- Navigation via the boundary wire with remote start points
- Navigation via a guide wire with remote start points
- Automatic passage recognition (HUSQVARNA)
- AIA (Artificial Intelligence Algorithm) (WORX)
- Edge mowing mode (actually not explicitly intended for narrow places, but suitable for tricks)
With the remote start points, the robotic mower can usually steer through a bottleneck passage relatively easily if it is a connection between two lawn areas. The AIA technology from WORX ensures that the robotic mower makes good progress when mowing within a bottleneck passage and ensures it does not get stuck there. Similarly, though it’s not designed for this specific use, you can use the edge mowing mode of various models for mowing in very narrow passages.
Navigation via the boundary wire with remote starting points
This technique is a function designed to navigate to remote locations that the robotic mower would otherwise not easily reach. You can use it, for example, to drive the robotic mower on several areas that are only connected by a narrow passage.
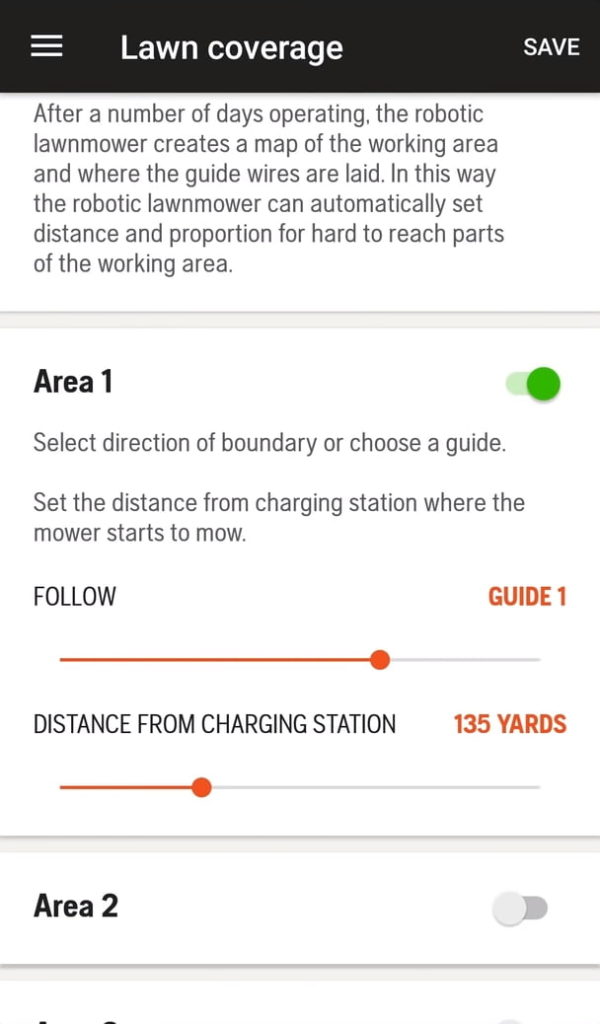
For example, if you have several surfaces that are connected to each other, you can set a remote starting point on the boundary wire on the area that is further away from the charging station. In doing so, you tell the robotic mower how many yards it has to drive over the boundary wire from the charging station until it reaches that point.
To get that far out, there is usually a special mode in which the robotic mower drives along the cable. Wherever you want to set a remote start point, you press a button in the app connected to the robotic mower. Or you can simply program the number of meters if you already know the distance. In most cases, you can then also specify how often your robotic mower should drive to this remote starting point during the week. For example, if the area at the remote start point is relatively small, it doesn’t need to go there very often.
If you want to know more about how to do this, take a look at the section under “Multi-Zone Function” and the video I included there.
If the robotic mower then wants to approach the adjacent area, it travels along the outside of the boundary wire. This enables it to navigate through very narrow passages and find the adjacent area.
With this technique the robotic mower can cross very narrow areas, but this does not mean that it can mow well within this area. Very narrow and long passages are generally difficult to mow. However, there are techniques for this, such as the AIA technique from WORX (see below).
Navigation via a guide wire with remote starting points
Navigation via a guide wire works in a similar way to navigation via the boundary wire. This technique is also primarily intended for navigation over large areas in order to get to a particular location more quickly, especially in complex areas where narrow passages connecting different areas have to be crossed.
Just like the boundary wire, you can set remote starting points on the guide wire. Here you can also simply program the distance by simply typing in the number of meters directly, or you can do a test run with the robotic mower, where the mower either displays the distance travelled on the guide wire, or you can press a button directly to determine where a remote start point is during the test run (depending on the model).
This technique can also be used to navigate through very narrow corridors, which serve as a connecting passage between two areas. The technique is even better suited for this purpose than navigation via the boundary wire, especially if the surface is quite complex.
With the guide wire, which is laid through the center of the work surface, the robotic mower does not have to make any major detours. Conversely, when driving over the boundary wire on the outside, it might make many bends and turns until it finally reaches its destination. So the same route on the boundary wire can sometimes be 3 times longer than on the guide wire.
Automatic Passage Recognition for Husqvarna
Husqvarna robotic mowers have a guide wire in addition to the boundary wire. This cable runs through the center of the work surface and is used by the robotic mower to either find its way back to the charging station when it wants to recharge, or to head for a specific remote starting point, as described above.
Although robotic mowers can also do this via the boundary wire, in complex yards the distance they have to cover via the boundary wire becomes quite long, as they have to take every turn and curve that the boundary wire makes. On the guide wire, on the other hand, the robot can simply drive in a direct line to its destination, which considerably reduces the driving time.
However, in this case, the robotic mower does not travel exactly centered on top of the guide wire, but within a corridor next to the guide wire.
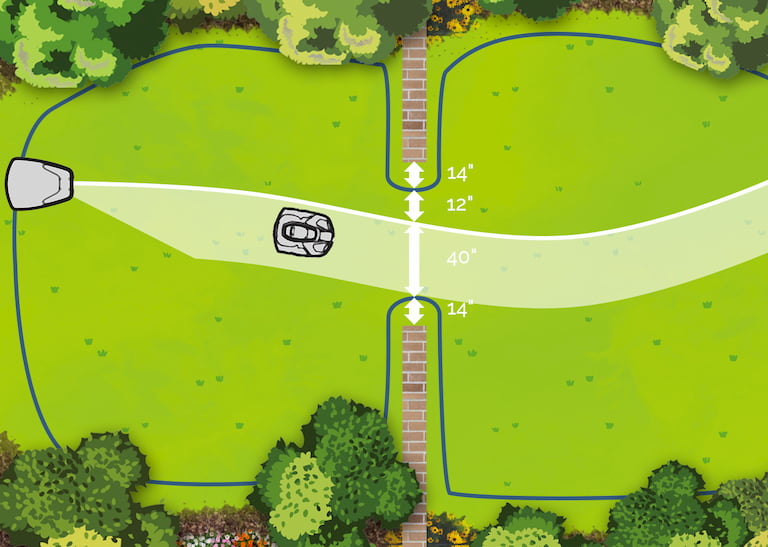
Robotic mowers with a guide wire travel along a corridor up to 40 inches wide next to the guide wire. With active Automatic Passage Recognition, the robotic mower decides on the corridor width itself and reduces it to 0 in narrow passages.
The width of this corridor can be adjusted on the robotic mower for most models. It can also be set to 0, so that the robotic mower does not drive in this corridor. However, the corridor is there so that the robotic mower does not always drive over exactly the same places, but can vary its track slightly within the corridor.
This is to prevent the formation of a track or rut in the lawn from the constant strain of the robotic mower continuously driving in the same place all the time.
However, the width of this corridor can make it difficult or impossible for robotic mowers to drive through narrow passages. Therefore, Husqvarna robotic mowers have a function called Automatic Passage Detection (Husqvarna).
If this function is active, the manual corridor settings become inactive and the robotic mower automatically adjusts the corridor width. If it enters a narrow passage, it notices this and adjusts the corridor so that it fits through the passage.
The Automatic Passage Recognition function is therefore designed in addition to the guide wire to enable the robotic mower to drive through very narrow passages despite the corridor.
GPS navigation in Husqvarna models
Husqvarna robotic mowers of the X line also have GPS navigation. This does not contribute directly to navigation through narrow spaces, but rather indirectly. Mowing robots with GPS navigation create a digital map of your yard during the first days of their operation. After a few days they will have completed the mapping.
On this digital map, they remember when they last mowed at a particular location. Using special resistance sensors on the mower, they can also measure how much the grass has grown since the last time it was mowed and calculate from this the approximate growing rate of the grass.
With these two pieces of information the robotic mower calculates for each point on the digital map when it has to mow there next time. If it finds that it has to mow again at a remote point in another area because it hasn’t mowed there for a while and the grass has probably become too high again, it starts to navigate there.
In narrow places, however, it is still dependent on a guide wire that guides it safely through the bottleneck.
AIA (Artificial Intelligence Algorithm) in WORX models
AIA is a special navigation technology developed for WORX Landroid robotic mowers. The technology should enable the robotic mower to adjust individually to certain characteristics of a yard and to mow it more efficiently, especially if the yard is a bit more complex.
For example, the robotic mower recognizes when it is in a narrow passage and navigates through it quite effectively. It is also helpful that when it hits the boundary wire, it does not reset and then change direction. It rather “bounces off” the boundary wire, fluently changing its direction when coming in contact with the boundary wire, without coming to a halt.
To give you a better idea of my somewhat cumbersome explanation, I have found a video here that shows quite well how a robotic mower navigates with AIA through a narrow passage.
Edge mowing mode
The edge mowing mode has not been designed to cope with bottlenecks. Rather, it is a function of some robotic mowers, with which they drive over the boundary wire at regular intervals on the outside, particularly close to the edge of the mowing area, while mowing the edge. In this way they can get a little closer to obstacles at the edge than other robotic mowers.
On very narrow passages, you can also use this function to mow inside the passage if it is otherwise not working properly because it is too narrow. The robotic mower then drives along the passage on the left and right and mows not only the narrow strip behind the boundary wire, but also a good distance inside the passage. However, whether this is sufficient to catch all of the grass in the passage depends on the passage’s width.
Preventing an accidental entry into a passage
There are situations where you do not want the robotic mower to drive into a passage in mowing mode, but only in search mode when it drives from one area to another via the boundary wire or the guide wire. Maybe there is no grass within the passage at all, because it is only a paved or dirt path leading between grassy areas. Then it would be pointless for the robotic mower to mow there.
The passage might also be so narrow that the robotic mower simply gets caught there because it has no technology to navigate the passage well. Even then you want the robotic mower to pass through the passage only in search mode, i.e. when it is guided by the guide wire or the boundary wire.
There are two different solutions for this. The simple solution is a special loop of the boundary wire at the entrance to the passage, which in 99.9% of cases prevents the robotic mower from entering it.
The somewhat more complex solution, but one that works even more reliably, is a special passage circuit that prevents the robotic mower from driving into the passage in mowing mode. The robotic mower is then equipped with a special Bluetooth transmitter with which, in search mode, it can operate a switch on the passage circuit to switch off the passage circuit and allow it to pass.
If you would like to know more about this, here you will find a detailed explanation of what you can do about bottlenecks to prevent your robotic mower from accidentally entering them.
Related questions
What is the minimum width of a bottleneck for robotic mowers? Depending on the model, a bottleneck must be at least between 2 feet and 1 meter wide when using a robotic mower. Husqvarna’s Automower robotic mowers can cope with the narrowest of bottlenecks at only 2 feet.
What must be considered when installing the boundary wire in narrow places? When installing the boundary wire in narrow places, the minimum distance between the left and right boundary wire must be considered. In addition, the passage must be wide enough for the robotic mower to pass through. Depending on the model, the distance between the boundary wire must be 2 feet to 1 m. If a guide wire is present, it must not be routed too close to the boundary wire. Last but not least, the distance between the boundary wire and external obstacles must also be taken into account.





I have a Husqvarna 430. It sometimes tries to mow the narrow path to be stuck between the wall and garden boundary. Is there any way to teach the Husqvarna mower not to mow these areas and just pass?
I have a one meter wide passage about three meters long on a fifteen degree slope to a normally closed gateway. Can the AM315X Husqvarna mow in such a restricted area and return to the main lawn area?